Hi,
just looking for somebody to verify my figures, as I'm hoping to get glass scales mounted on my little probing machine and be up and running as quick as possible, so am asking in advance before things go well/totally belly up!
So having read the guide on the website, I come up with the following figures-
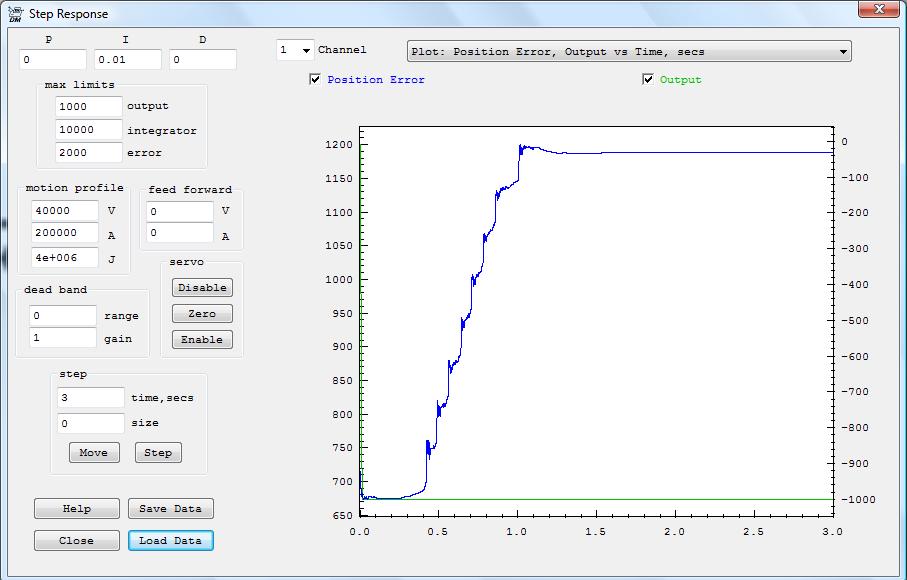
200 stepper motor steps x 16 KStep uSteps gives me 3200 pulses per 4 mm (ball screw pitch)
Now the scales I've bought are 1micron, so I should get one count per micron, which means I should get 4000 count per 4mm.
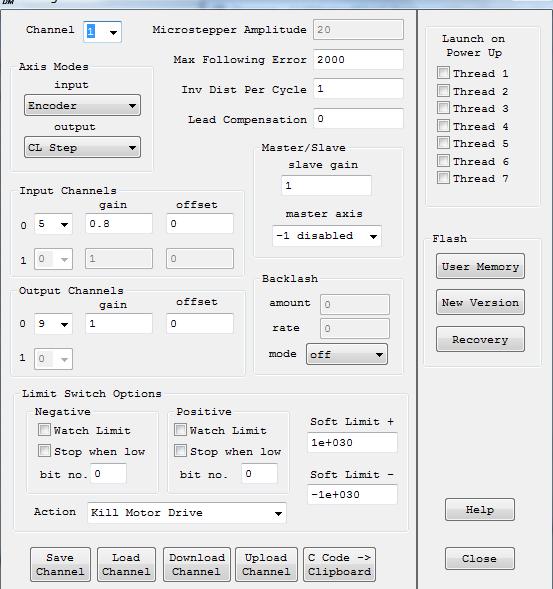
Now according to the website, my gain ratio should be steps/enconder count = 3200/4000 = 0.8
Does that sound right?
Thanks
Moray
{kind=link}
{kind=link}
{kind=link}
{kind=link}